|
LSH-Core
Deterministic firmware core for Controllino-based Labo Smart Home nodes
|
|

| |
|
LSH-Core
Deterministic firmware core for Controllino-based Labo Smart Home nodes
|
|
|
| |
Implements the controller-side bridge handshake state machine. More...
#include "communication/bridge_sync.hpp"#include "communication/constants/config.hpp"#include "communication/serializer.hpp"#include "util/saturating_time.hpp"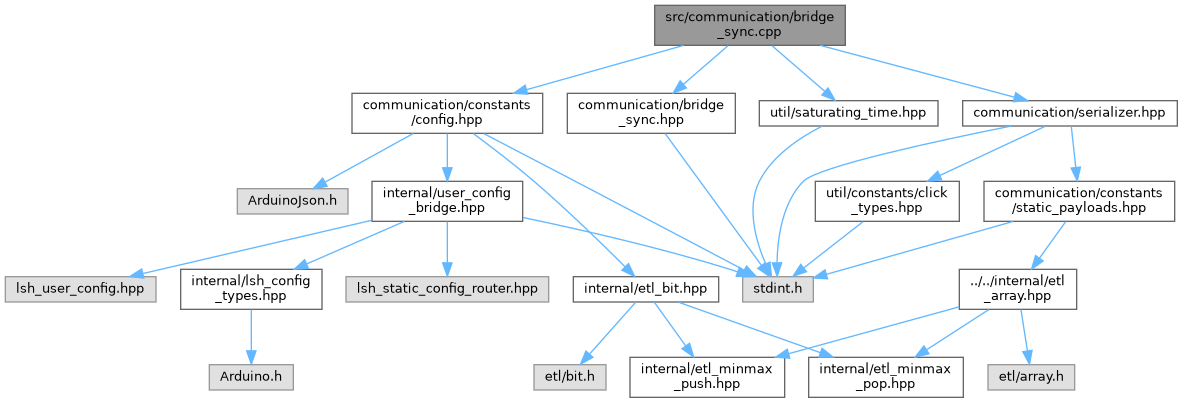
Functions | |
| void | BridgeSync::begin () |
Mark the bridge as out of sync and send the initial BOOT. | |
| void | BridgeSync::restartFromBridgeBoot () |
| Re-open the handshake after the bridge explicitly requested a runtime resync. | |
| void | BridgeSync::tick (uint16_t elapsed_ms) |
| Advance the bridge synchronization state machine. | |
| void | BridgeSync::onRequestDetailsServed () |
Record that REQUEST_DETAILS has just been served. | |
| void | BridgeSync::onRequestStateServed () |
Record that REQUEST_STATE has just been served. | |
| auto | BridgeSync::allowsStateRequests () -> bool |
Return whether REQUEST_STATE may be served safely right now. | |
| auto | BridgeSync::allowsMutatingCommands () -> bool |
| Return whether inbound bridge commands may mutate controller state. | |
Implements the controller-side bridge handshake state machine.
Copyright 2026 Jacopo Labardi
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
| auto BridgeSync::allowsMutatingCommands | ( | ) | -> bool |
Return whether inbound bridge commands may mutate controller state.
Mutating commands stay blocked until the bridge completed the REQUEST_DETAILS -> REQUEST_STATE handshake after the latest boot.


| auto BridgeSync::allowsStateRequests | ( | ) | -> bool |
Return whether REQUEST_STATE may be served safely right now.
State snapshots are blocked while the bridge still has to request details first, otherwise it could interpret a fresh state using a stale topology model.


| void BridgeSync::begin | ( | ) |
Mark the bridge as out of sync and send the initial BOOT.
This is called whenever the controller starts up. From that moment on the bridge must ask for REQUEST_DETAILS and REQUEST_STATE before controller-side mutating commands are trusted.
| void BridgeSync::onRequestDetailsServed | ( | ) |
Record that REQUEST_DETAILS has just been served.
When the bridge is waiting for details this transitions the handshake into the phase where a subsequent REQUEST_STATE is expected. When already synchronized this remains a harmless read-only refresh.


| void BridgeSync::onRequestStateServed | ( | ) |
Record that REQUEST_STATE has just been served.
This closes the startup handshake only when the bridge was already in the AwaitBridgeState phase of the current synchronization session.
| void BridgeSync::restartFromBridgeBoot | ( | ) |
Re-open the handshake after the bridge explicitly requested a runtime resync.
Unlike begin(), this helper must not emit another BOOT back to the bridge. It only resets the controller-side trust gate so the caller can immediately serve fresh details and state in response to the bridge BOOT.


| void BridgeSync::tick | ( | uint16_t | elapsed_ms | ) |
Advance the bridge synchronization state machine.
This hot-path helper emits periodic PING_ payloads once the bridge is synchronized, retries BOOT while waiting for REQUEST_DETAILS, and times out back to the boot phase if the bridge stalls after requesting details but before requesting state.
| elapsed_ms | Milliseconds elapsed since the previous bridge housekeeping pass. |